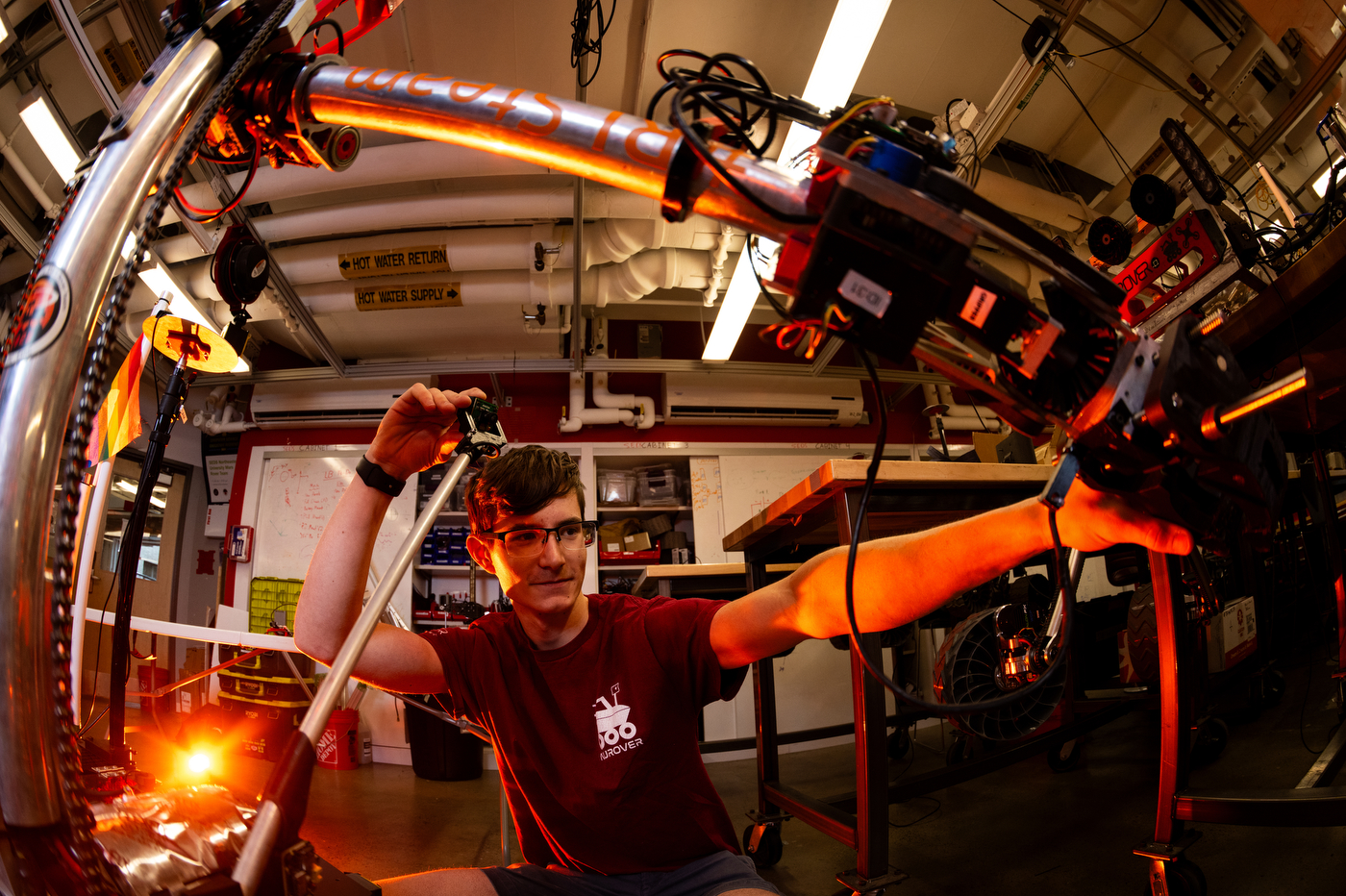
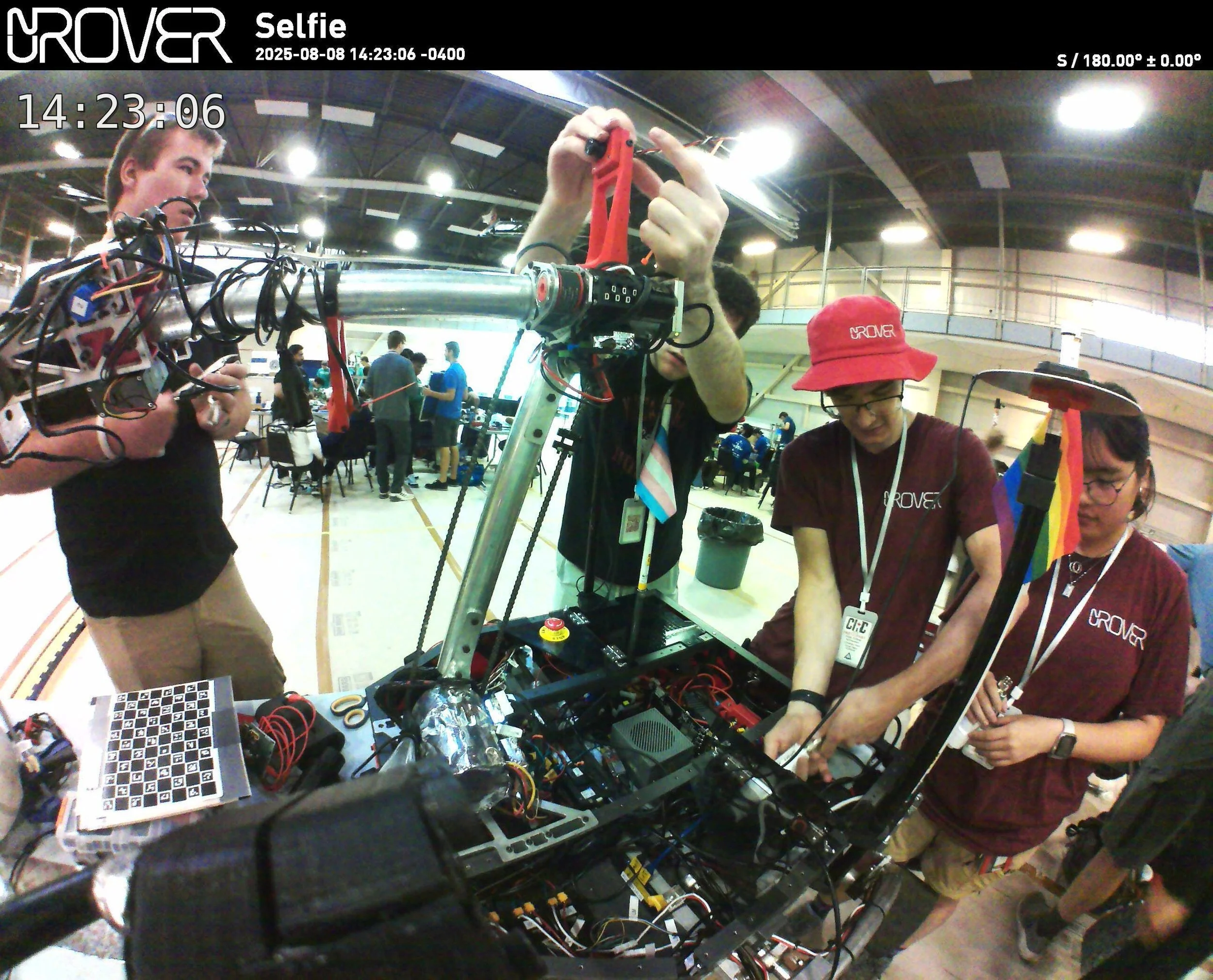
Noah Büttner works on the rover arm on Thursday, June 26, 2025.
Photo by Alyssa Stone/Northeastern University Global News
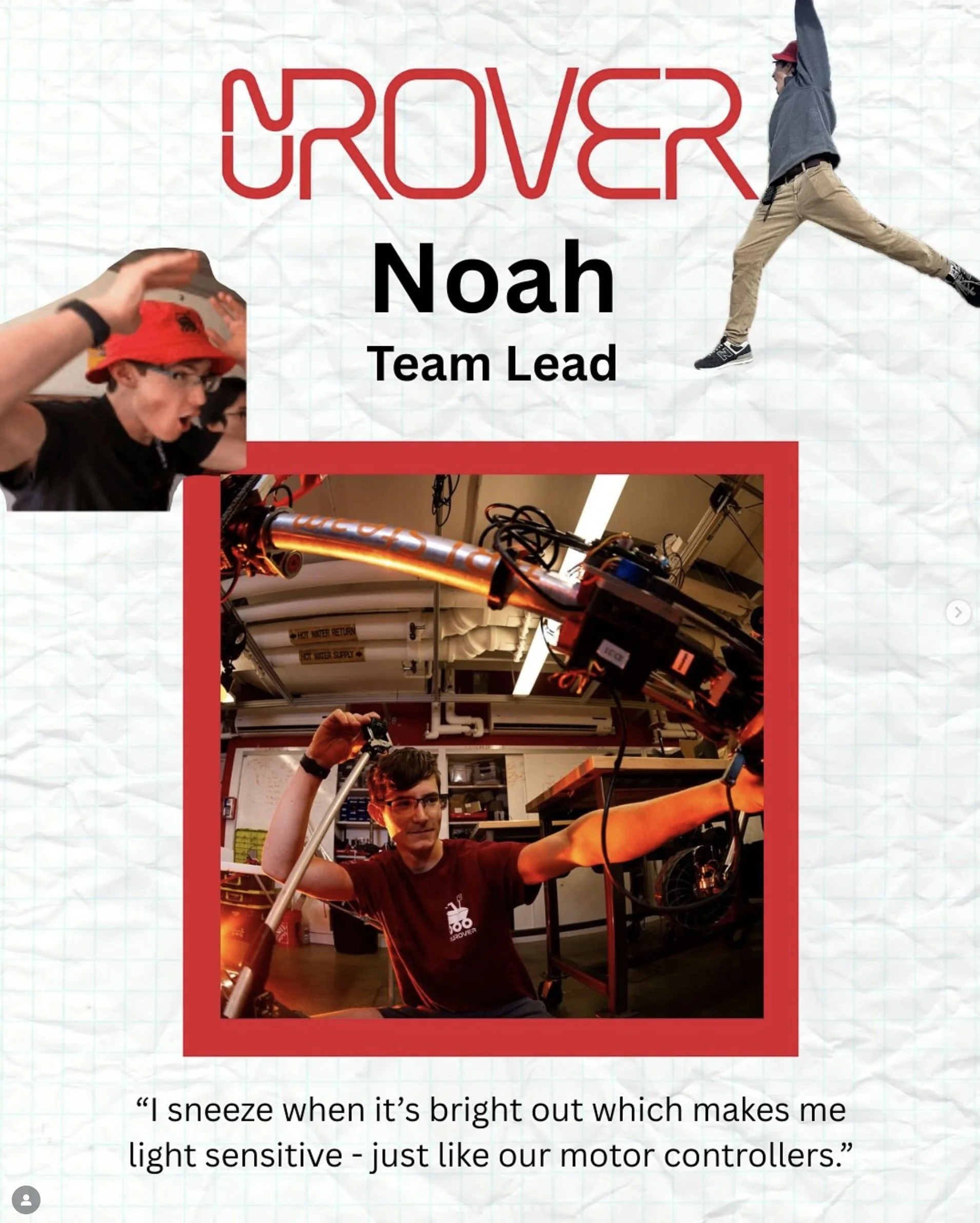
Noah Büttner
We all encounter situations in our lives where we recognize flaws in current products or processes. Whenever I come across something that doesn’t quite work as well as it could, my mind instantly turns to the solution side of things, looking for ways to make it more efficient.
The transformation of wires and lines of code into a tangible product has always been my motivation for creation. All of the effort that went into design, building, and debugging becomes worthwhile once the product is real. Whenever I fix a bug in code, or remap an electrical component, the satisfaction drives me to keep creating.
nurover
Team Lead
I’ve spent most of my free time at Northeastern leading the Northeastern Mars Rover Team.
As Team Lead, I head up a team of 100+ multi-disciplinary students working to build a fully-functional Mars Rover to compete in the University Rover Challenge and other international competitions.



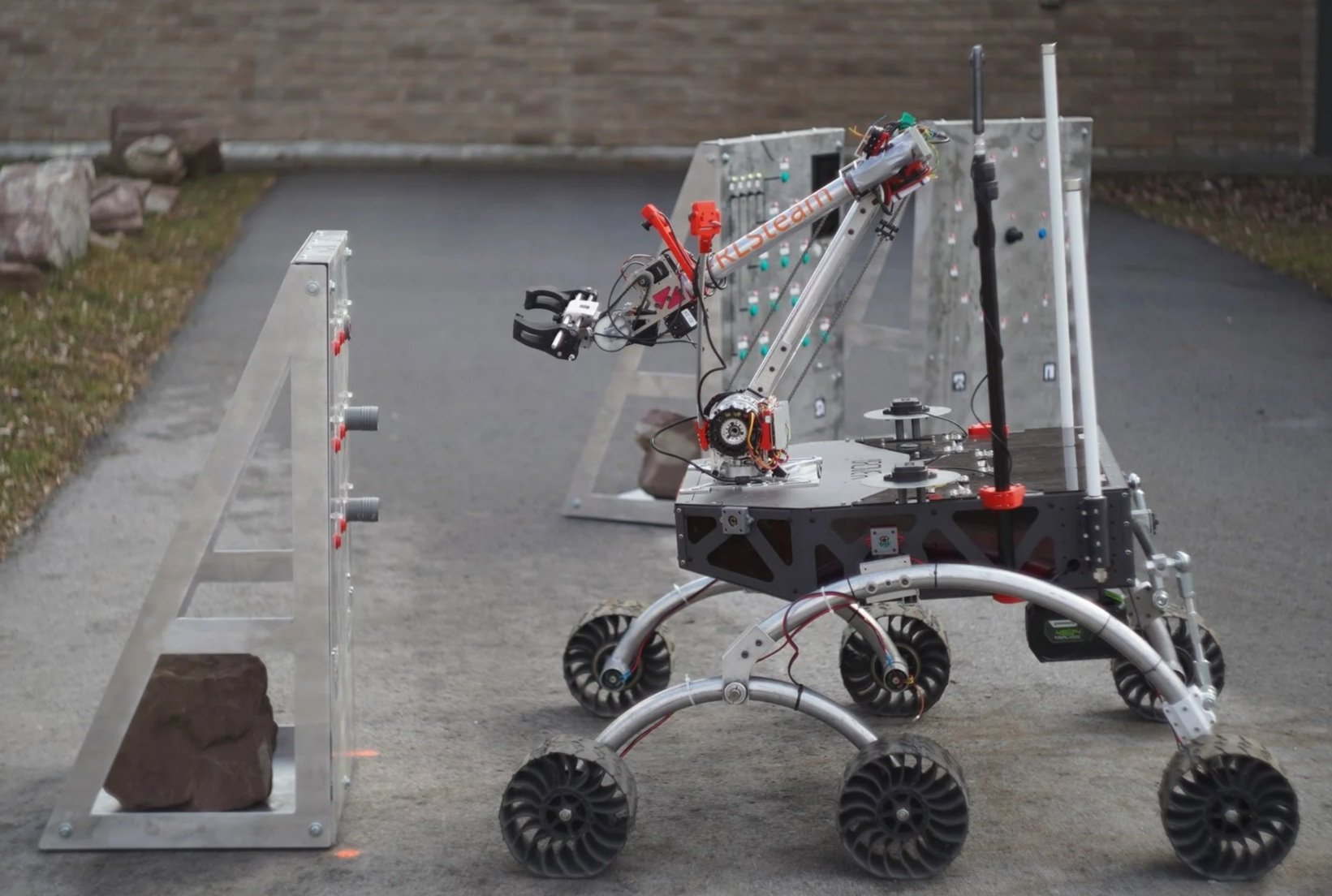
As the Integration Lead and Software Lead of the Northeastern University Mars Rover Team, I’ve designed, built, wired, and programmed our 50 kg rover equipped with a 6 DOF arm, life detection system, and multiple wireless communication bands. In my four years on the team, I’ve spearheaded technical advancements in all major subsystems, including the addition of:
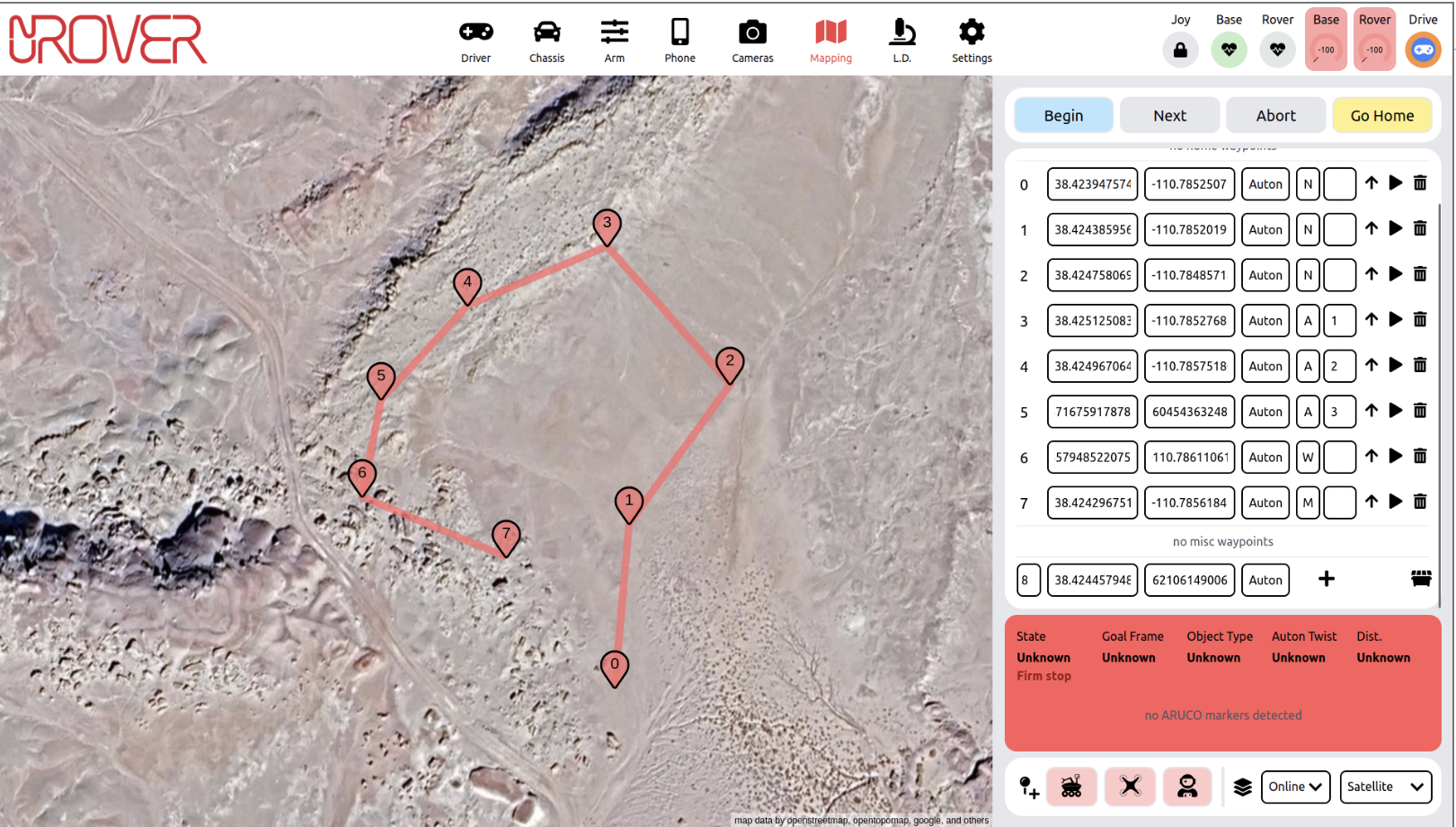
Complete autonomous navigation
Wireless operation up to 2km away
Inverse kinematics control algorithms for brushless motors and RLS absolute encoders
Intuitive control interface with haptic force feedback to our scaled down “model arm”
Robust wireless streaming of 15 cameras
Linear Quadratic Regulator on SO(2) Lie Group for each of the end effectors’ continuous joints


competition / awards
In 2025 our rover — Watney Mark VI — placed 3rd at the University Rover Challenge, from a field of 114 teams from 15 countries. I led the team of 24 students through the challenges of integration and testing during a week-long journey in robotics integration in the desert.
My most favorite challenge was discovering that our arm’s motor controllers were light sensitive, something we could have only encountered while operating in the bright Utah sun. This has quickly become a running joke on our team for how Murphy’s law will always apply.


We’ve also attended competitions in Canada, with 1st and 4th place finishes in the winter and summer Canadian Rover Challenges in 2024-25.


Directing and producing our System Acceptance Review video.

Community outreach
Teaching and being a mentor to others has always been a part of my journey as an engineer, with rewarding experiences centered around providing STEM-learning opportunities for kids who may not otherwise have the chance to get involved with robotics. In high school, I mentored 20 FIRST Lego League teams, leading their weekly team meetings and gaining experience with how to work with a wide variety of younger students.
Wanting to bring these same opportunities to Northeastern, I organized our NURover board to dramatically increase our outreach program. We now participate in 20+ events annually, including the Boston Public Schools Science Fair, the Northeastern Preschool, local showcases to students in Roxbury schools, and representing Northeastern at the MassRobotics RoboBoston Block Party. I’ve also led the team at the Museum of Science’s Computer Science Education Weekend every year, where kids play “rover fetch” and learn about how robots think and act. At the same time, the rover team gains incredible feedback from these events, which demonstrate which systems are robust for multi-hour usage and how the public interacts with and perceives our robot.
My favorite mentoring experience has been the Northeastern SPLASH program. In high school, attending SPLASH at MIT each fall was an annual highlight, spending two days soaking up random one-hour lessons from energetic college students. At Northeastern, I’ve taught SPLASH classes to middle and high schoolers each semester, presenting lectures like “How to Build a Robot Arm” and “Radios in Space” with live rover demos. With 10-20 kids in each section, the environment challenges me to make learning fun and be aware of the wide range of backgrounds and prior knowledge.







INDUSTRY EXPERIENCE
Through Northeastern’s experiential learning and additional summer internships, I’ve benefited from organizations where I’ve developed technical research experience.As a co-op on the Engineering Operations team at the Robotics and AI Institute (formerly Boston Dynamics AI Institute) I operated and serviced a wide variety of robots. This role let me interact with many different disciplinary teams, with a highlight of presenting my learnings to the organization at the end of the semester. Additionally, I was able to assist a PhD student with a research paper related to improving manipulation perception by segmenting distractor objects from observation sets.
I gained experience with state of the art robots such as the Boston Dynamics Spot, Kinova, Franka, and Rainbow RB-Y1 platforms.

Dephy
I was a software intern in Summer 2022 and 2023 for Dephy, an ankle exo-skelton startup that mentored my high school robotics team. Dephy introduced me to the excitement of seeing lab work develop into a commercial product, while working on their exoskeleton inspired me with the transformational benefits robotics can bring to people.
My projects at Dephy included creating a compact wireless relay for data to server leveraging ESP32 and Raspberry Pi for recording at 100s Mbps, engineering a bespoke project management application leveraging Google Cloud Platform which was adopted as company-standard for portfolio management of all active projects, and designing and implementing an AWS server application to centralize and categorize collected data points for analysis using a normalized MySQL relational database in RDS, and Elastic Load Balancer in Elastic Beanstalk.

ENTREPRENEURIAL ENDEAVORS
I’ve started or co-founded several ventures, including NinjaWorks, a hardware and software cloud company that is the timing backbone for ninja warrior obstacle course competitions around the globe, including serving as the official timing system for the World Ninja League and their World Championships.
Over the past decade, the popularity of the television show American Ninja Warrior has led to the creation of hundreds of “ninja gyms” around the world where normal people have the opportunity to test themselves against rigorous upper body and agility obstacles, and even to compete in recreational ninja leagues.
The journey for me started ten years ago, when I started Ninja Warrior training and built my own backyard training course. After we finished the initial design, my younger brother and I decided that one thing was missing – a timer and buzzer that would make our home course feel just as cool and exciting as the TV show.
I was inspired at age 11 to make my own contributions to the sport by starting a family business to build and sell timing hardware and software to ninja gyms across the country. For the first prototype, I adapted the device I built for my fifth grade science project into a ninja timer, buzzer, and lights for our backyard. After my coach saw the system and wanted one of his own for the gym, our company NinjaWorks was born.



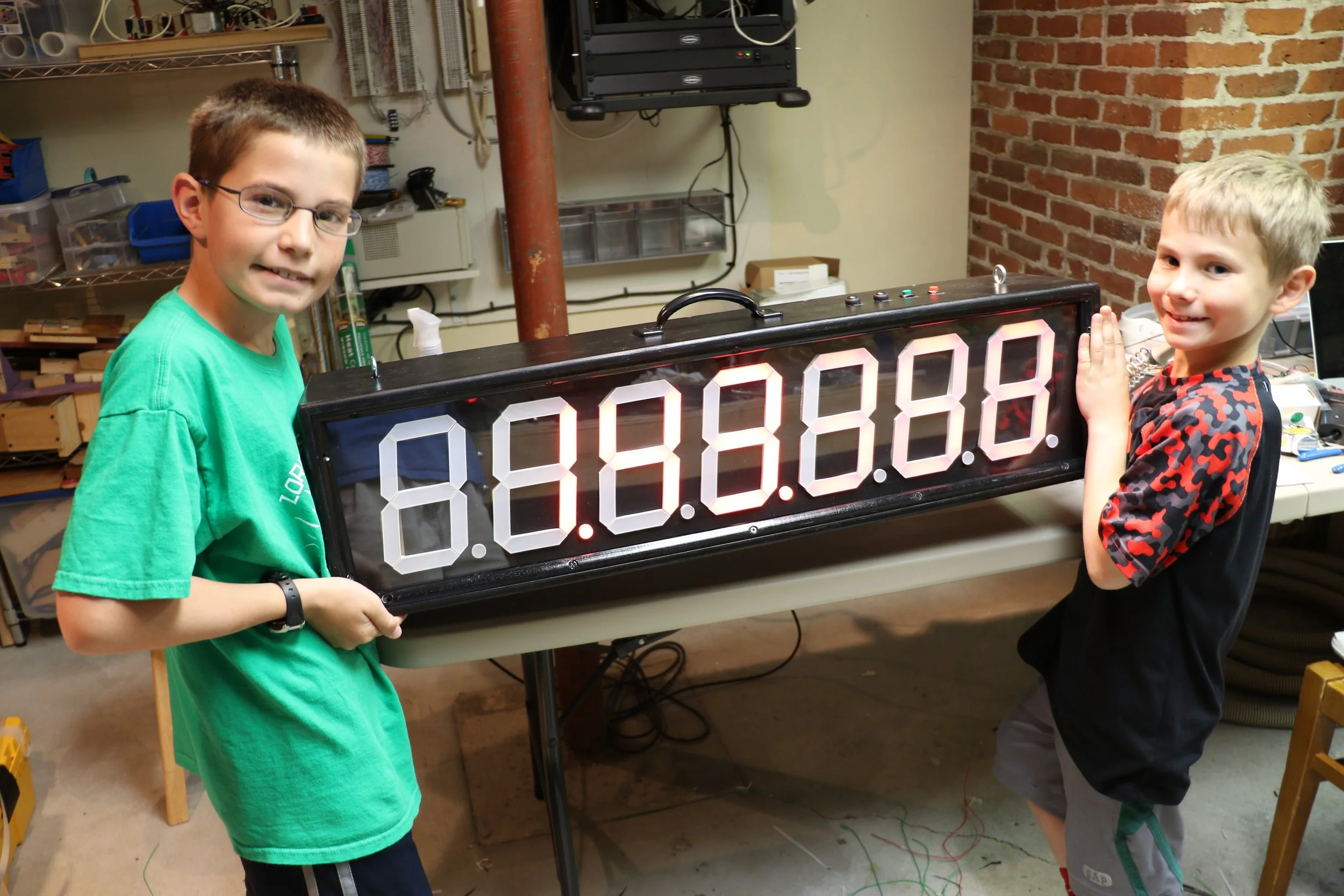
As we began developing a robust commercial product, we evolved from the tiny LCD display to a 7-segment display, and eventually into a 32x128 LED pixel display that connects to the internet using a microprocessor. After my dad and I built the first systems by hand, we were able to move to commercial production, allowing me to shift the focus of my time to software development.




I’ve spent countless hours iterating on that initial hardware and software architecture. The system quickly turned into much more than just a timer, capable of connecting to smoke machines, sound systems, and the internet where competition results could be tracked. There are now tens of leagues, hundreds of gyms, thousands of competitors, and hundreds of thousands of competition runs operating with the NinjaWorks system each year. While my involvement with the day-to-day work of the company tapered off when I left for college, NinjaWorks has continued. I still join the team at the World Championships each summer, where we set up three miles of ethernet, audio, and livestream cables and manage five days of fast-paced, high-stakes international elite competition.
Virtual Jeopardy
I created the online game site virtualjeopardy.com for students and organizations across the world to use during the pandemic and beyond.

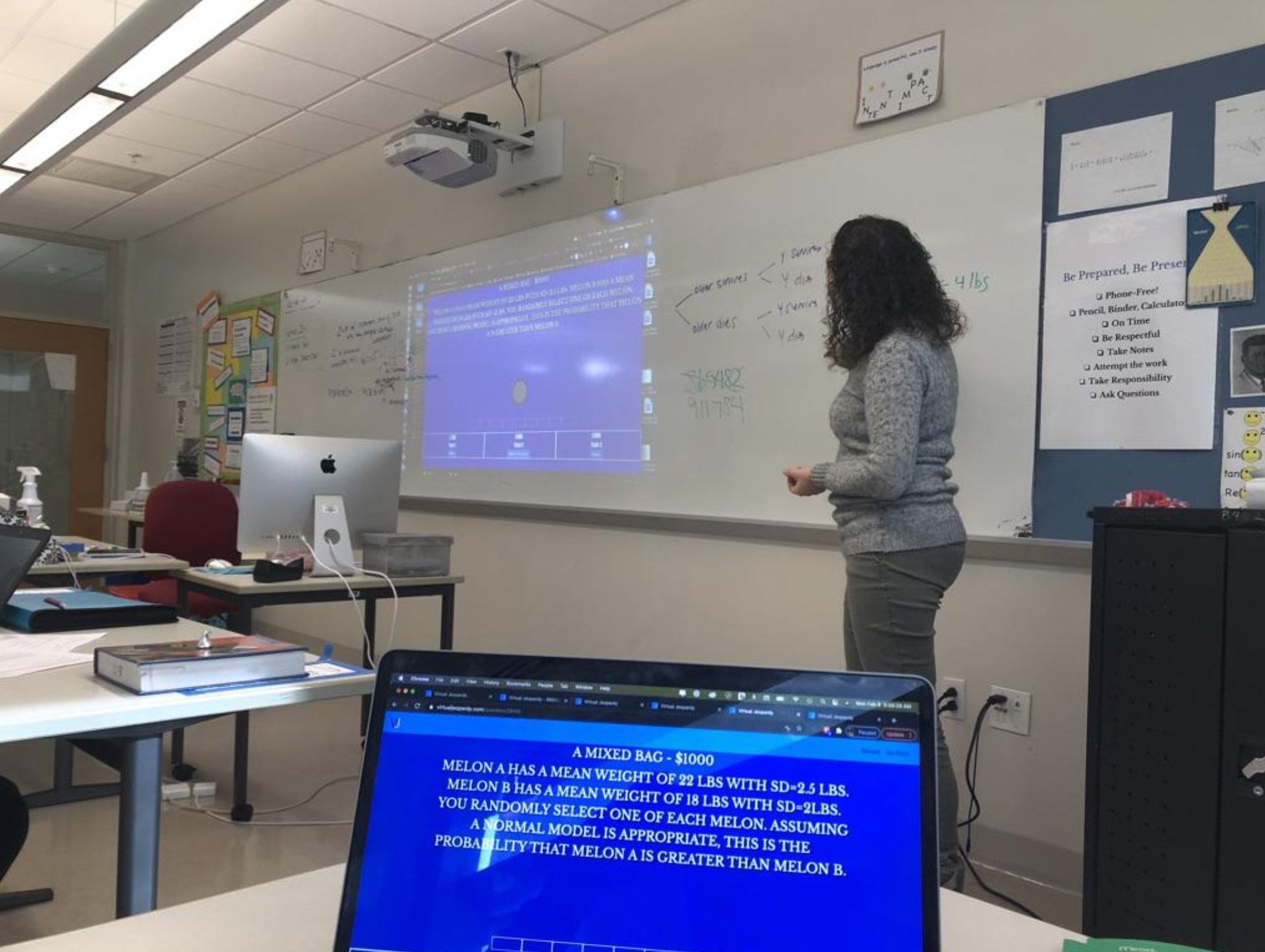
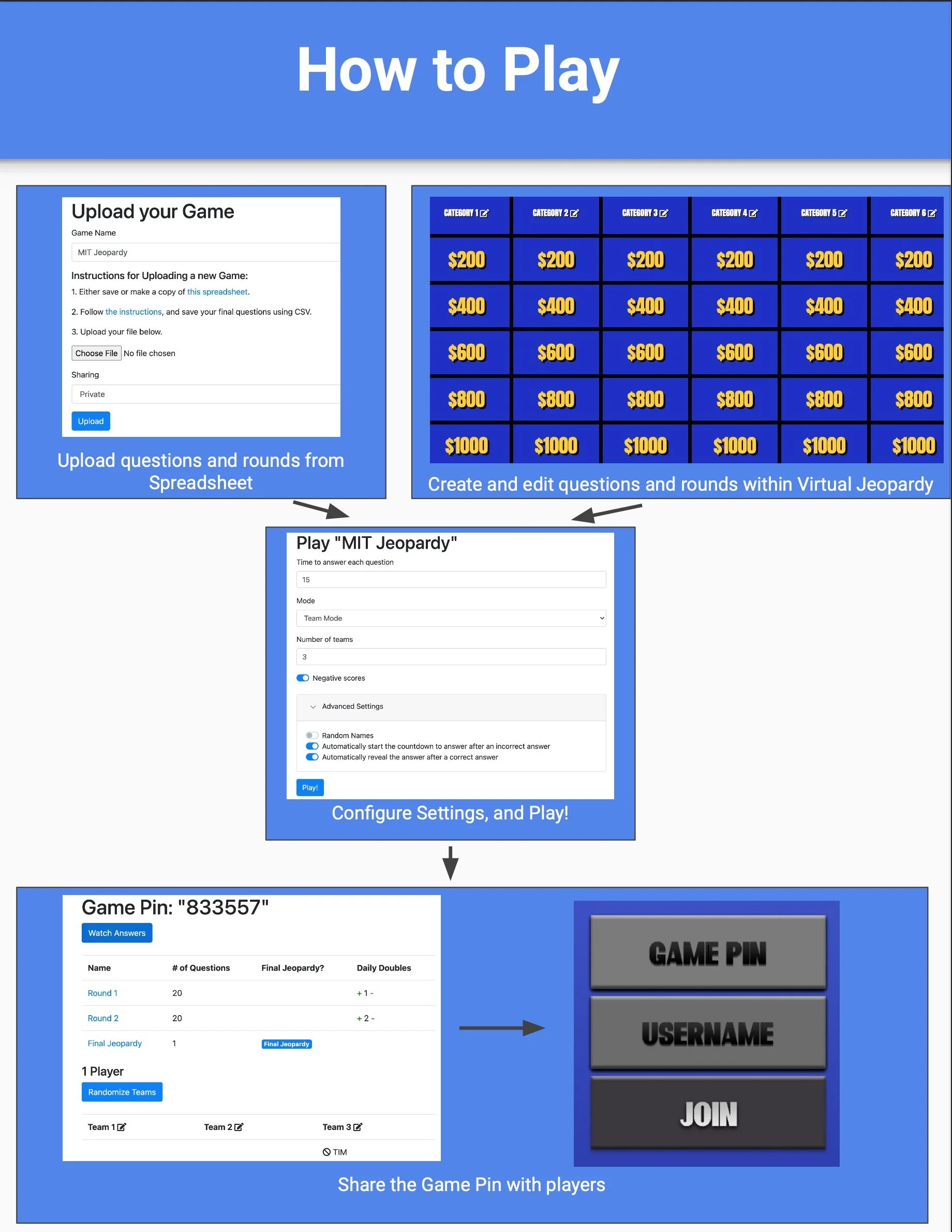
I created a free website that teachers could use to give students the full Jeopardy experience, for test prep or interactive learning activities both in online and in-person environments. I invited teachers at my high school to create accounts so that they could use Virtual Jeopardy in their classes for test review. Two of my own teachers used the site during the 2020-21 school year, providing more beta testing and opportunities for improving features before releasing it to the whole school.
The website ran from 2021 through 2024, used by thousands of educators, business and community organizations, and individuals, with more than 5,000 games played in 40+ countries
Colleges - Duke, USC, College of NJ, etc.
Corporations - Capital One, Progressive
International Users - Australia, Singapore, Philippines, Mexico, Poland, Canada, Barbados, Trinidad and Tobago, Denmark, etc.

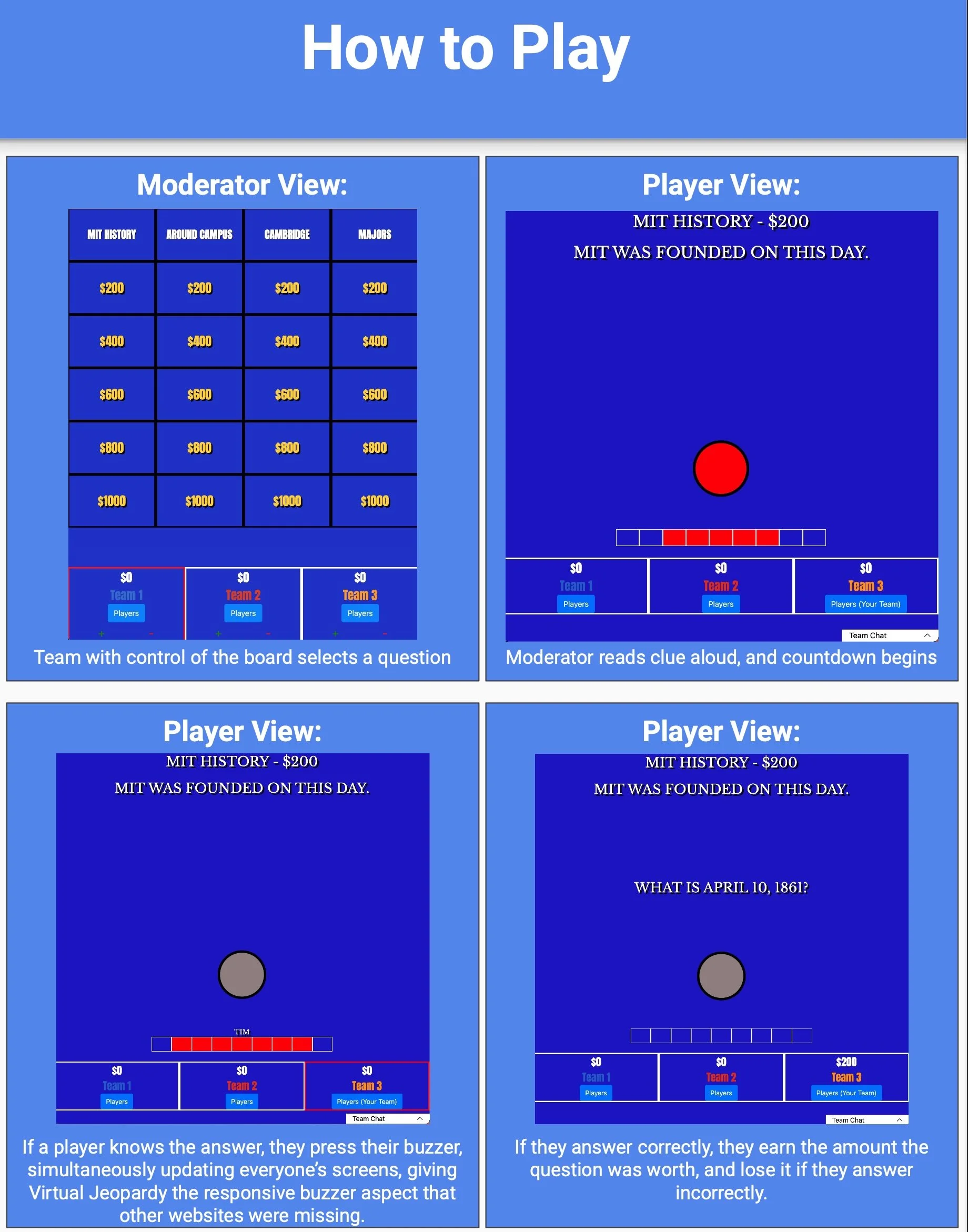
I had always played Jeopardy in classes as a kid, however the currently available websites never implemented the true play style of the TV show:
No buzzers: Rotated taking turns to answer questions
No Daily Doubles or Final Jeopardy
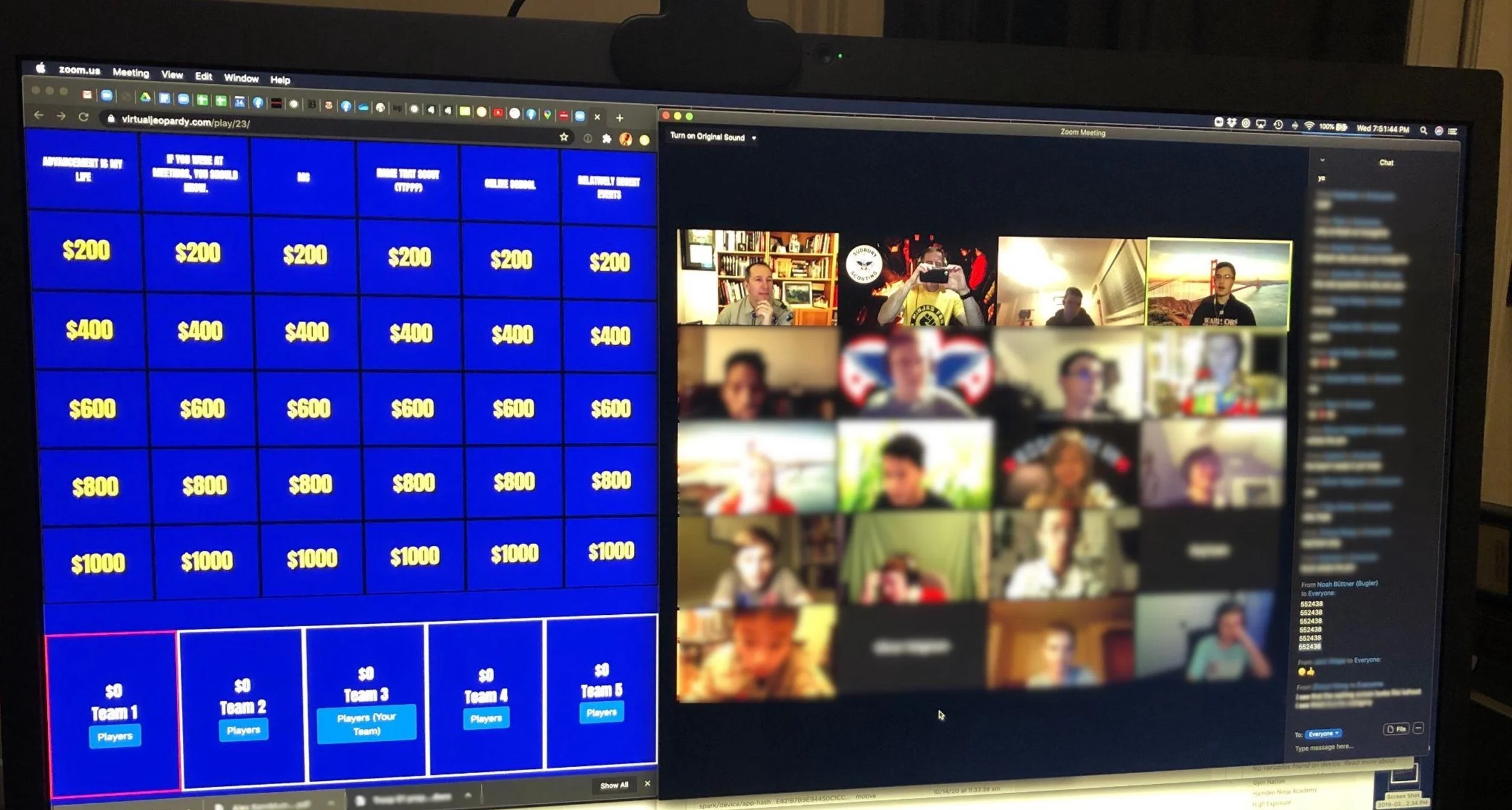
My Boy Scout troop had enjoyed playing an in-person version of Jeopardy that I had created to teach camping and scouting skills, but we wanted to be able to continue the game experience once meetings went online due to the pandemic.